
ETCカードをお使いのみなさま、こんにちは。
今回は、国交省、警察庁、総務省にて立ち上げられた「自動運転インフラ検討会」において自動運転における一般道に求められるインフラ支援についてどのような議論が進められているかをご紹介したいと思います。
自動運転における一般道に求められるインフラ支援としては、
以下の大きく2つの要素があげられています。
- 路車協調システム
- 走行空間の整備
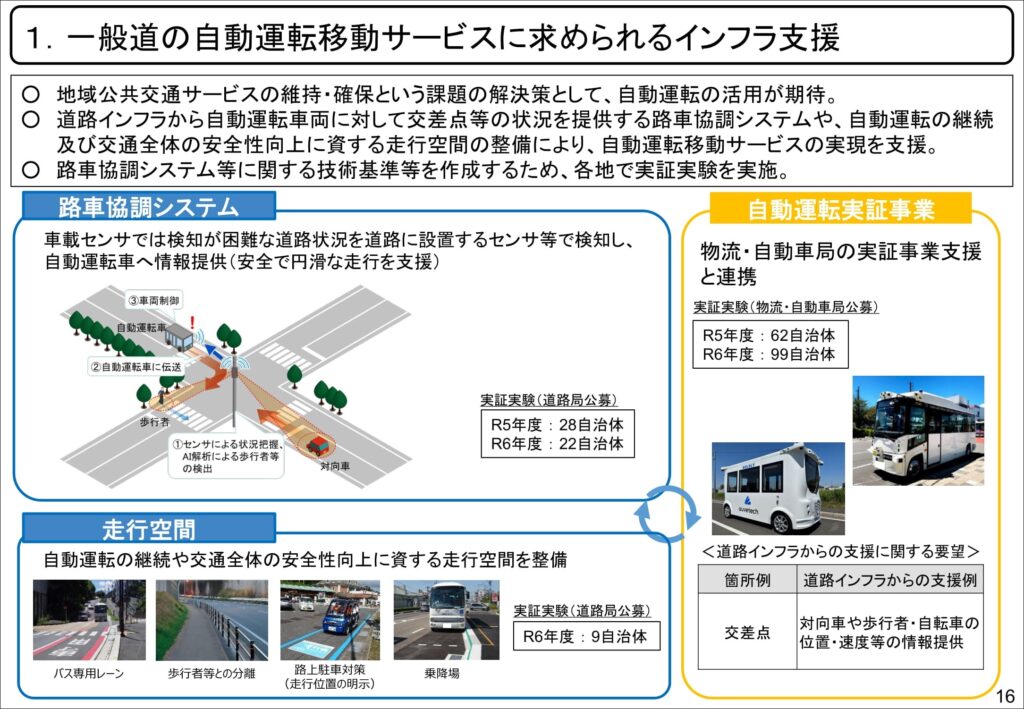
「路車協調システム」は、車載センサでは把握できない死角の状況を交差点センサなどにより把握し、自動運転車に伝達することで、自動運転車の安全で円滑な走行を支援することを目的としています。
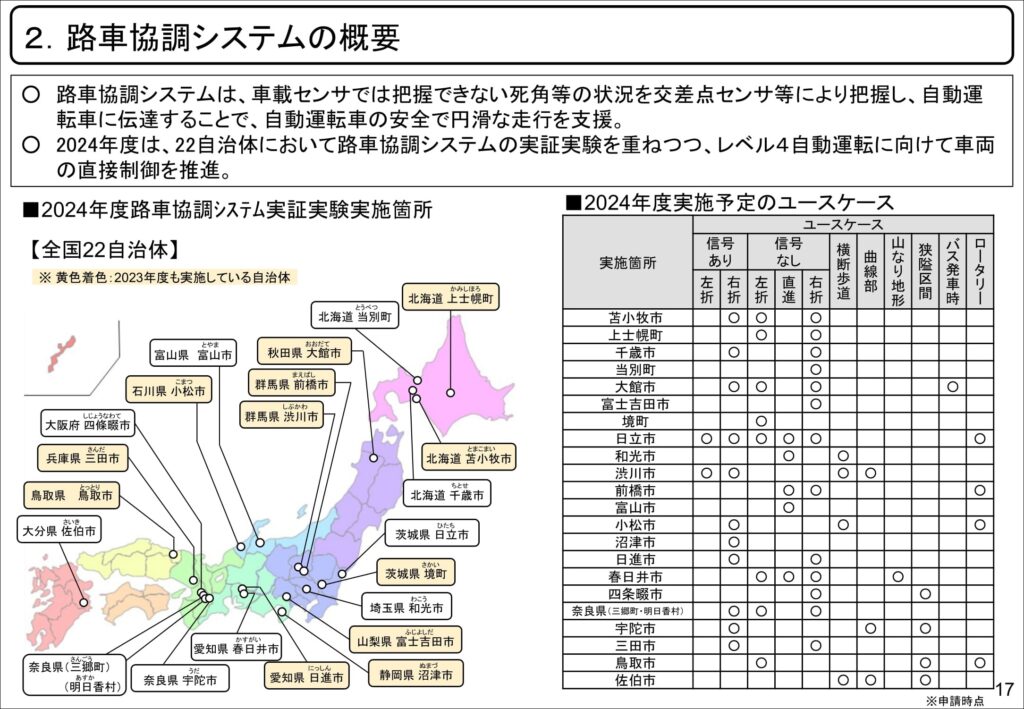
2024年度は、22自治体において路車協調システムの実証実験を重ねつつ、レベル4自動運転に向けて車両の直接制御を推進しているとのこと。
実証実験を実施している自治体やユースケースは以下の通りです。
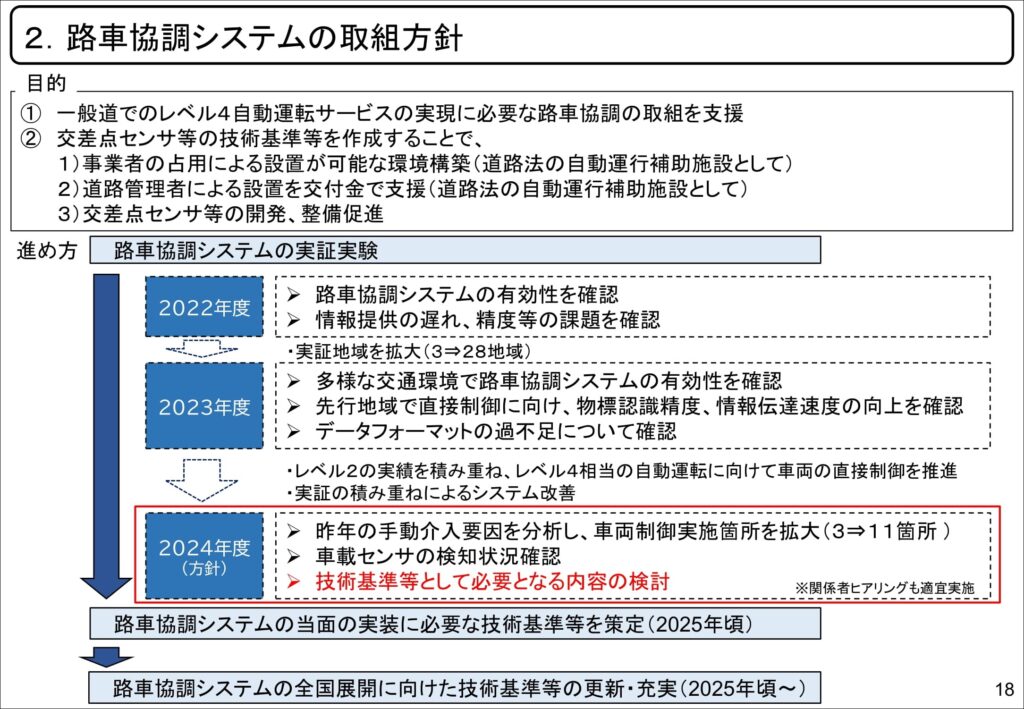
「路車協調システム」の取組方針としては、2024年度までに路車協調システムの実証実験を行い、2025年頃に路車協調システムの当面の実装に必要な技術基準等を作成し、その後は全国展開に向けた技術基準等の更新・充実に取り組むとのこと。
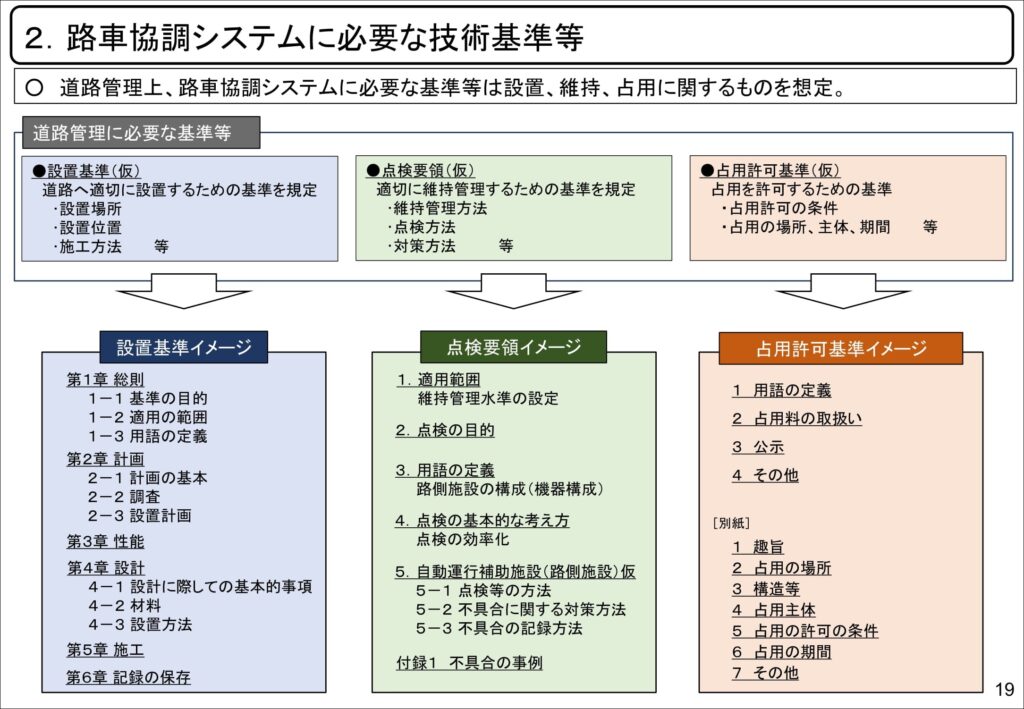
路車協調システムに必要な技術基準としては、
- 設置基準
- 点検基準
- 占用許可基準
の3つの基準に関するものを想定しているとのこと。
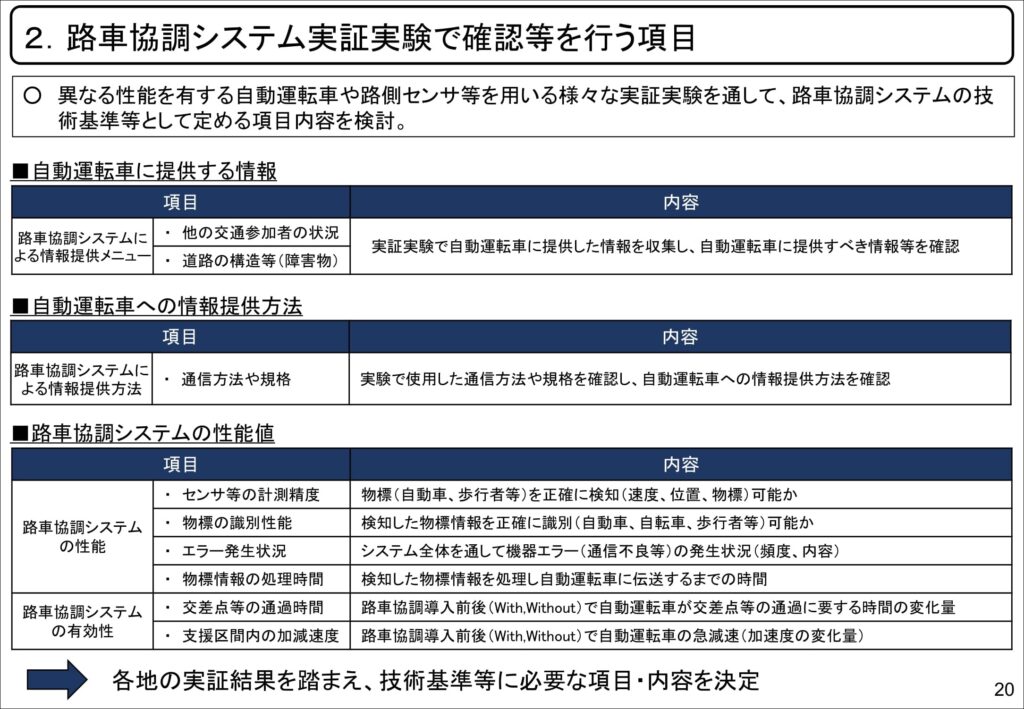
路車協調システムの実証実験で確認を行う項目は、以下のようになっています。
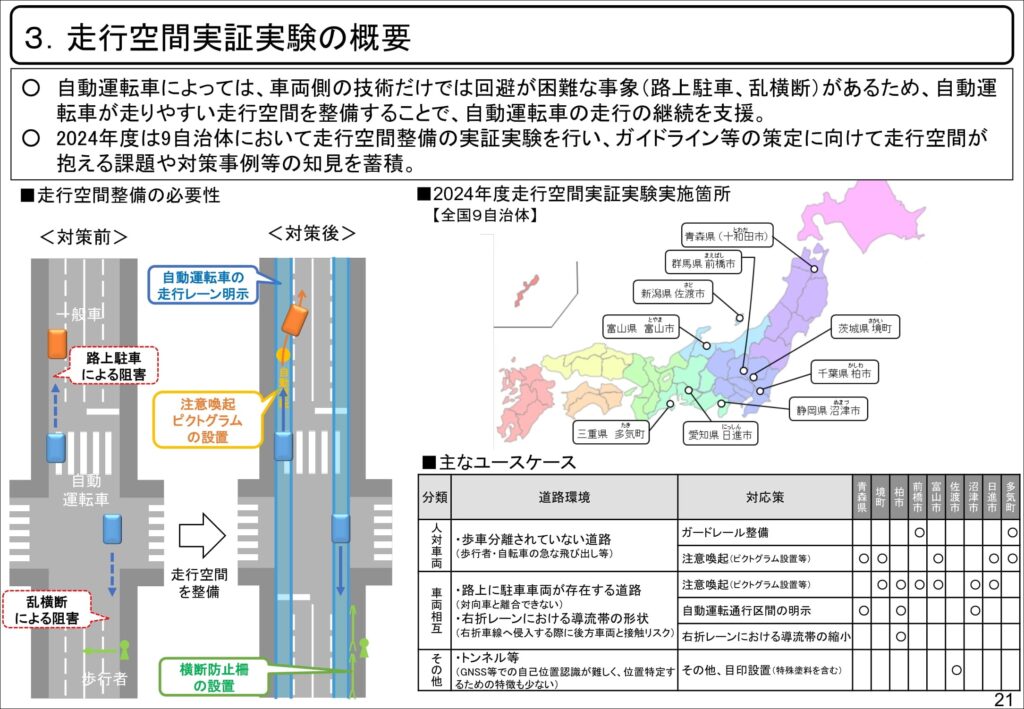
次に、インフラ支援のもう1つ大きな要素である「走行空間の整備」ですが、こちらは、自動運転車側の技術だけでは回避が困難な事象(路上駐車や乱横断)があるため、自動運転車が走りやすい走行空間を整備しようというものです。
2024年度は、9自治体において走行空間の実証実験を重ねつつ、ガイドラインの策定に向けて走行空間が抱える課題や対策事例等の知見を蓄積していくとのこと。
実証実験を実施している自治体や主なユースケースは以下の通りです。
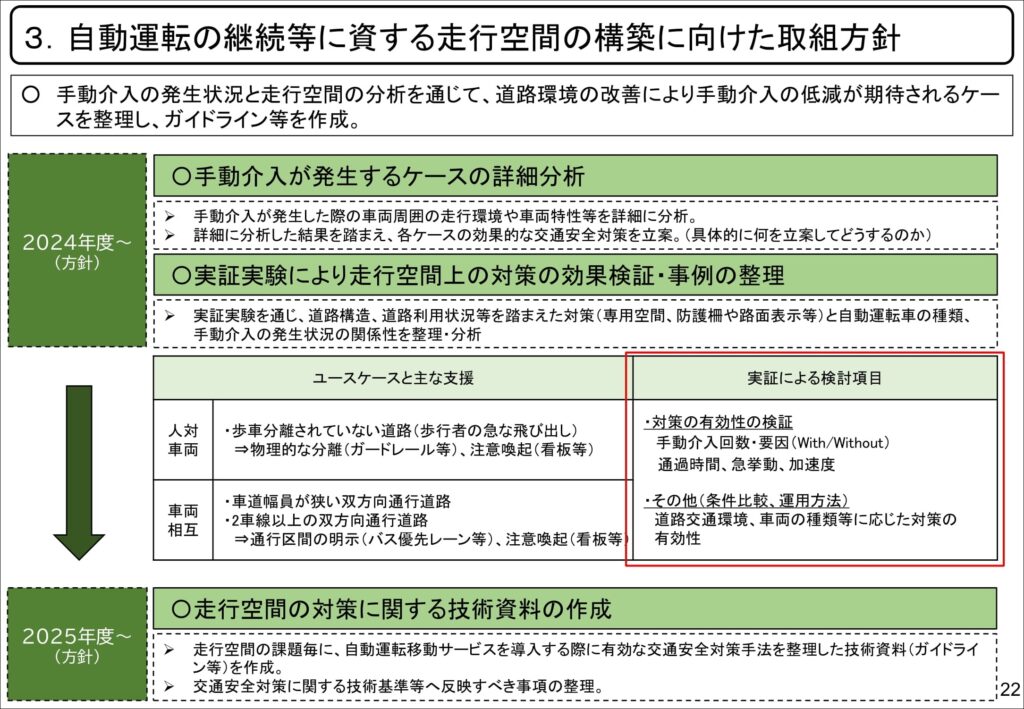
「走行空間の整備」の取組方針としては、2024年度までに走行空間の実証実験を行い、2025年度に走行空間の対策に関する技術資料の作成に取り組むとのこと。
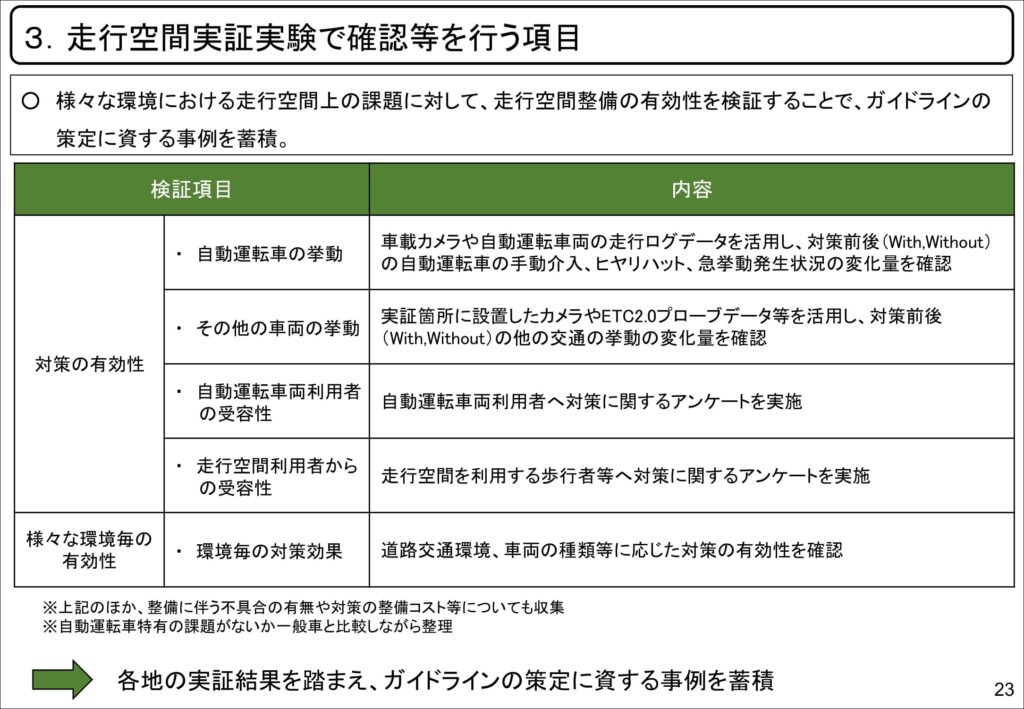
走行空間の実証実験で確認を行う項目は、以下のようになっています。
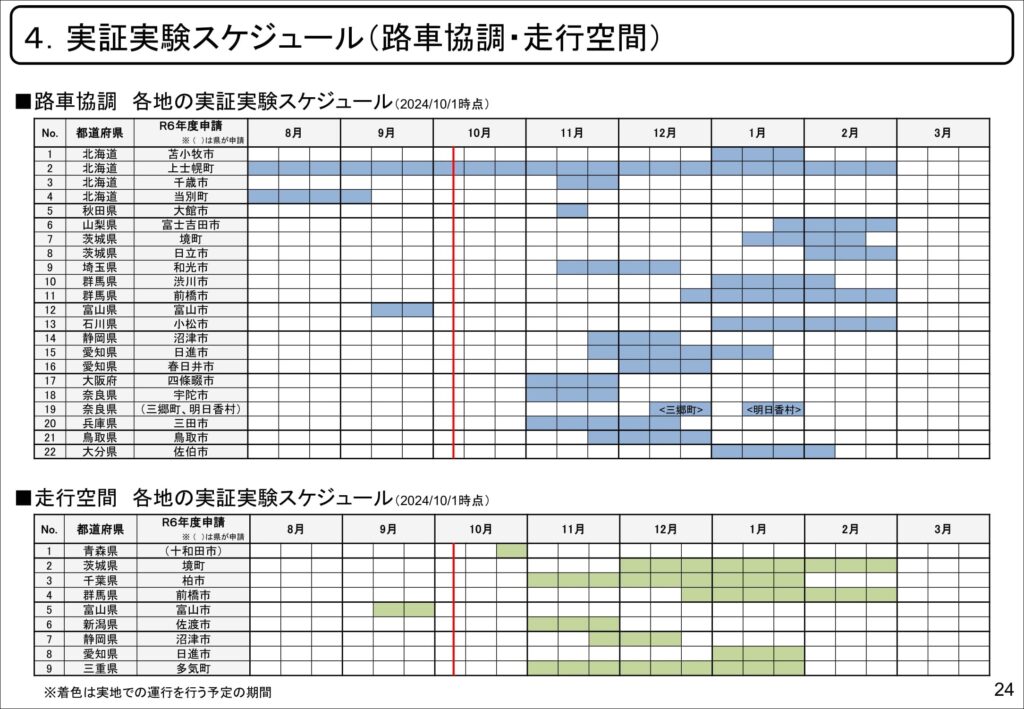
「路車協調」と「走行空間」の2要素に関する2024年10月1日時点での実証実験のスケジュールは以下のようになっています。
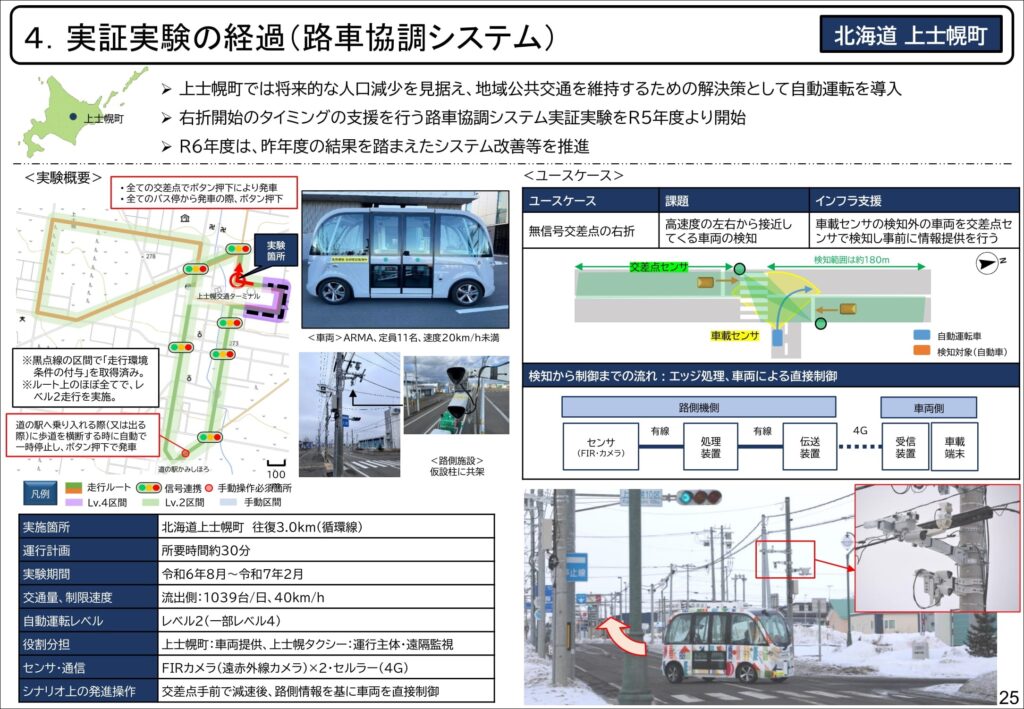
以下、北海道・上士幌町での「路車協調システム」の実証実験の経過です。
上士幌町では将来的な人口減少を見据え、地域公共交通を維持するための解決策として自動運転を導入、右折開始のタイミングの支援を行う路車協調システムの実証実験を令和5年度より開始、令和6年度は、昨年度の結果を踏まえたシステム改善に推進しているとのこと。
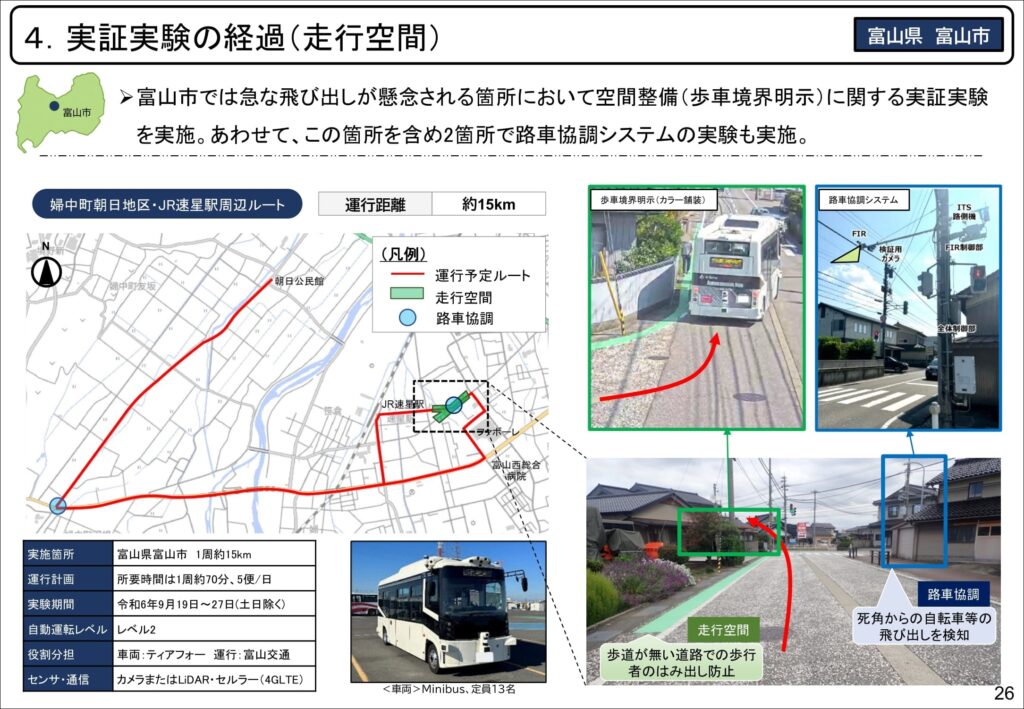
以下、富山県・富山市での「走行空間」の実証実験の経過です。
富山市では急な飛び出しが懸念される箇所において空間整備(歩車境界明示)に関する実証実験を実施し、あわせてこの箇所を含め2カ所で路車協調システムの実験も実施しています。
今後の展開方針としては、様々なユースケースでの実証実験を通じて明らかにした知見を基に、技術基準等(路車協調)やガイドライン(走行空間)を策定し、自動運転移動サービスの実現に貢献していくとのこと。
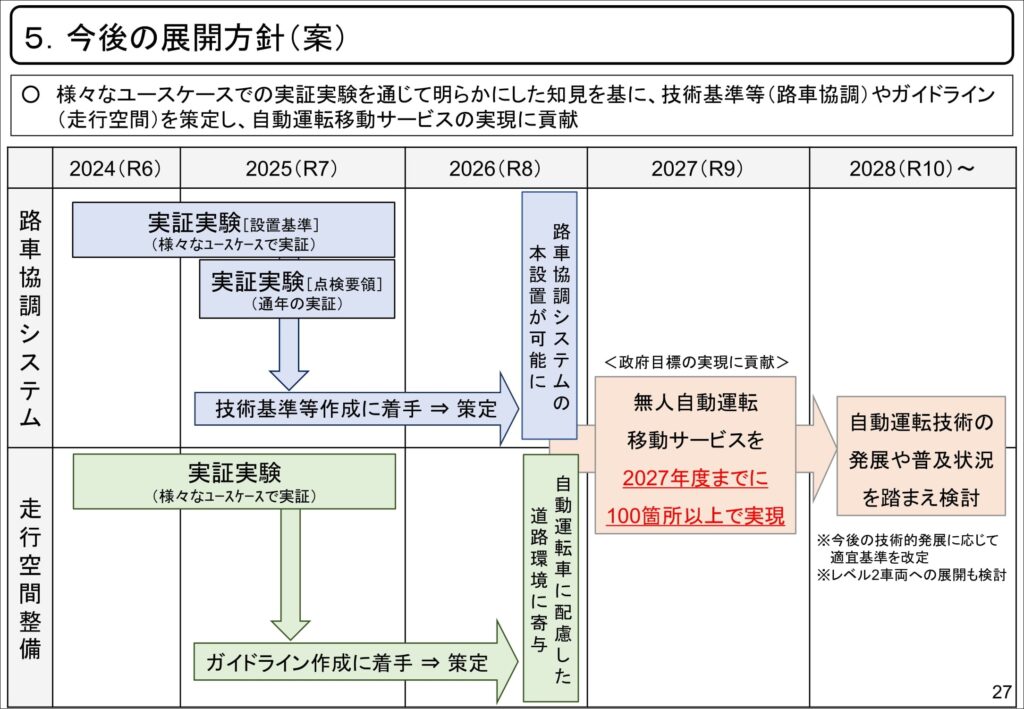
2024年3月28日に開催された「第3回デジタルライフライン全国総合整備実現会議」にて以下の目標が設定されています。
2025年を目途に全国50カ所程度、2027年度までに全国100カ所以上で自動運転車による移動サービス提供が実現できることも目指す
今後の動向に注目ですね。
最後まで読んで頂き、誠にありがとうございました。